Our faculty, staff, graduate and undergraduate students pursue a wide range of projects all focused on maintaining and enhancing the lives of people with disabilities.
You can look at various videos of CARRT research and service projects through the following link: CARRT YouTube Channel

Projects
Active Projects
Robotic Teleoperation to Autonomy through Learning
Live Drone Control using the Brain-Machine Interface
Feedback-based Stroke Rehabilitation Using Multiple Simultaneous Therapies
Enhancement & Verification of Countermeasure Analysis Tools for Human Exploration Missions
Biomechanical Analysis for Enhancement of Lunar Surface Operations Modeling
Body-as-a-Network Monitoring and Alert System
Monitoring Prosthetics and Orthotic Function in the Community
Past Projects
WMRA Robotic Gripper
Abstract
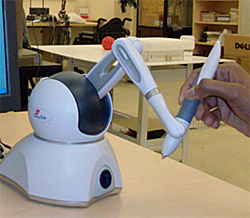
This paper presents a low-cost and self-contained robotic gripper that can be integrated into various robotic systems. This gripper can be used to accomplish a wide array of object manipulation tasks, made easy by its design and features a wide array of sensors that can be used to help accomplish these tasks. Furthermore the gripper has been made to be compatible with many robotic systems.
Motivation
Many existing grippers used in robotics today have varying capabilities which only allow them to perform certain tasks or grab certain objects for manipulation. These grippers may lack additional features (i.e. cameras or sensors) that allow them to better perform tasks. Additionally, many of these robotic grippers will only interface with the system they were designed for. To get these features that we needed for our projects, along with the flexibility to migrate the gripper from system to system, a new gripper had to be made.
Design Features
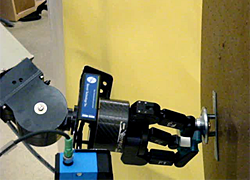
The gripper features a small 24v DC motor with an encoder that can be used to read the position and speed of the gripper. It also has a slip clutch to prevent over extending of the gripper. The unique cupped design of the gripper, emulates a human hand, allowing for more accurate grasping. Furthermore, the gripper contains a camera, and a distance sensor for finding the objects' position. Finally, the gripper has a current sensor that can be used to shut off the gripper if the force on the gripper exceeds a certain threshold for a given object.
Design Features
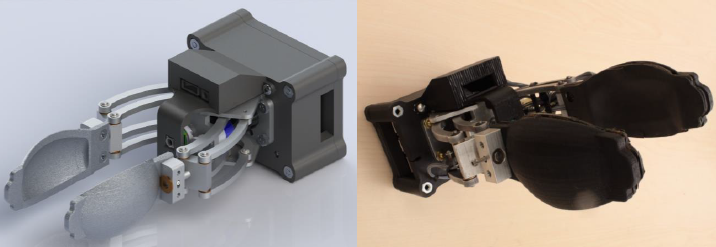
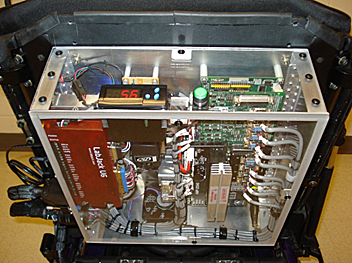
Packaging
In order for this gripper to be able to interface with other robotic systems without modification to the design of the gripper it was necessary to bundle all of the required components into a single control box. This control box consists of the microcontroller, motor controller, voltage regulators, and current sensing equipment required for the system to function. Additionally, the microcontroller allows for interfacing with the gripper via Ethernet, Wi-Fi, Bluetooth, or
USB. The Gripper assembly is powered via an external Power Supply (battery or DC adapter). In order to interface with the various added components in this gripper, a full software library was written in C++ that allows users to control the gripper, grab sensor information, and view the camera, without any additional programming. This library is cross-platform and can be used on mobile devices.
Operation
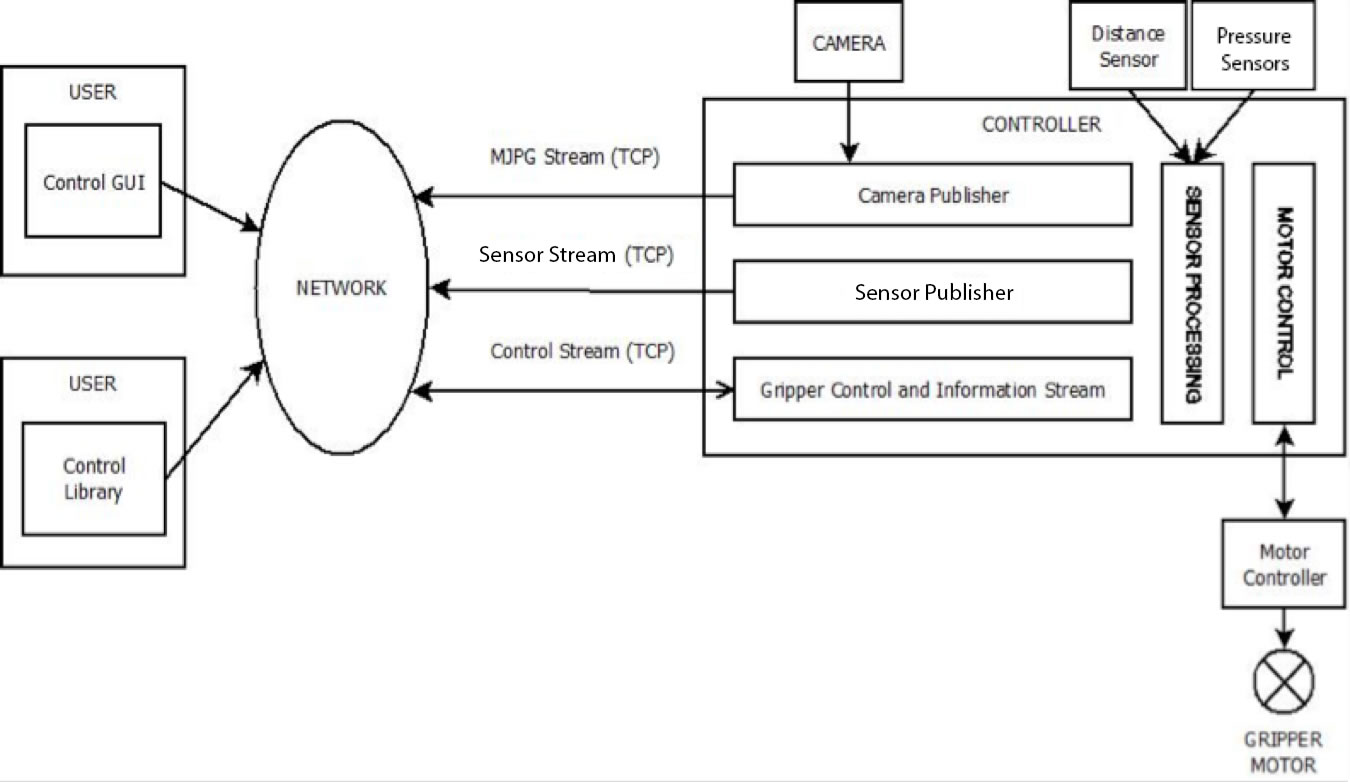
Above: The gripper control overview showing the flow of control and sensory information when using a TCP/IP based interface within the gripper system, including the transmission with the users.
The gripper system has several different interfaces through which it can be controlled. The gripper can either be controlled internally, in which the control programs are stored and run on the gripper's controller automatically, or remotely, in which the user is controlling the gripper from another device. The gripper system supports remote operation via Ethernet, Wi-Fi, and Bluetooth, with expansion to other communication formats available via the gripper controller's onboard USB ports.
Included with the gripper system is a custom Gripper Operation Program that grants the user easy operation of the gripper from a computer. The Gripper Operation Program allows the user to control the openness / closeness of the gripper via a simple slider bar, as well as the speed at which the gripper opens / closes. Additionally, the Operation Program allows the user to see all of the sensor information coming from the gripper, including the distance sensor, pressure
sensors, and camera. The Operation Program also allows the user to set pressure cutoff limits. These cutoff limits force the gripper to stop closing / opening when a pressure threshold has been reached. This feature prevents the gripper from exerting too much / too little force on an object. The Operation Program is available for Windows, Mac OS X, and Linux.
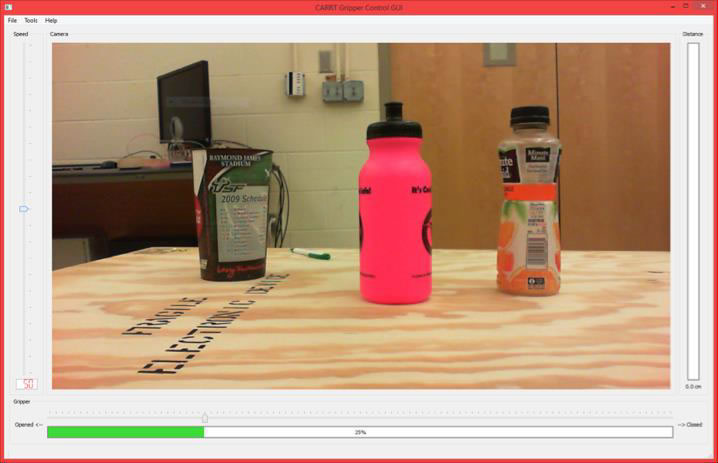
Above: The Gripper Operation Program showing the camera view, gripper position controls, gripper speed adjustment, and distance sensor information
Results
While the all-in-one control system for the WMRA Gripper was still being developed, the Gripper itself has been used in the Wheelchair Mounted Robotic Arm (WMRA) as the system's primary gripper. Using this Gripper, the WMRA has successfully manipulated objects of different classifications including bottles, cups, markers, etc. With the addition of the current feedback and shutoff, the Gripper should gain the ability to grasp objects that can be crushed by the gripper. Finally, the high resolution and high frame rate of the camera would better allow for the usage of computer vision algorithms to perform object detection and classification of the target objects, and more accurate grasping.
Conclusion
This gripper is an effective, fully featured, and cost effective device that can be used in a wide array of robotic manipulation tasks. Additionally, the gripper can be added to existing robotic systems with little (if any) modification to the existing system or the gripper.
Neural Network Speech Recognition
ABSTRACT
This work focuses on the research related to enabling individuals with speech impairment to use speech-to-text software to recognize and dictate their speech. Automatic Speech Recognition (ASR) tends to be a challenging problem for researchers because of the wide range of speech variability. Some of the variabilities include different accents, pronunciations, speeds, volumes, etc. It is very difficult to train an end-to-end speech recognition model on data with speech impediment due to the lack of large enough datasets, and the difficulty of generalizing a speech disorder pattern on all users with speech impediments. This work highlights the different techniques used in deep learning to achieve ASR and how it can be modified to recognize and dictate speech from individuals with speech impediments.
NETWORKS ARCHITECTURE AND EDIT DISTANCE
The project is split into three consecutive processes; ASR to phonetic transcription, edit distance and language model. The ASR is the most challenging due to the complexity of the neural network architecture and the preprocessing involved. We apply Mel-Frequency Cepstrum Coefficients (MFCC) to each audio file which results in 13 coefficients for each frame. The labels (text matching the audio) is converted to phonemes using the CMU arpabet phonetic dictionary. The Network is trained using the MFCC coefficients as inputs and phonemes’ IDs as outputs. The Network architecture implemented is a Bidirectional Recurrent Deep Neural Network (BRDNN – fig.1), it consists of 2 LSTM cells (one in each direction) with 100 hidden blocks in each direction. The network is made deep by stacking two more layers, which results in a 3 layers network in depth. Two fully connected layers were attached to the output of the recurrent network with 128 hidden units in each. This architecture resulted in a 38.5% LER on the Test set.

Figure 1: Deep Bidirectional LSTM
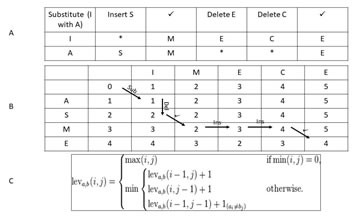
Levenshtein edit distance (fig. 2) is used to generate potential words from phonemes. Edit distance of one means a maximum change of one phoneme is allowed, edit distance of two means a change of one or two phonemes is allowed when generating the potential words, and so on. These changes can be inserts, deletes or replacements. The language model uses the potential words to generate sentences with the most semantic meaning. The language model is another recurrent neural network model trained on full sentences. The model outputs the probability of a word occurring after a given word or sentence. It is simpler than the main speech recognition model because it is not bidirectional and not as deep. The language model uses beam search decoding to find the best sentences.
Figure 2: A) Edit operations B) Dynamic programming of Edit Distance C) Algorithm from Wikipedia |
||
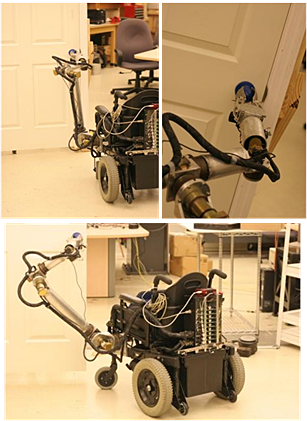
Wheelchair Mounted Robotic Arm
WMRA is a project that combines a wheelchair's mobility control and a 7-joint robotic arm's manipulation control in a single control mechanism that allows people with disabilities to do many activities of daily living (ADL) with minimum or no assistance, some of these activities and tasks are otherwise hard or impossible for people with disabilities to accomplish.

Hardware Design and Control
- Seven motorized revolute joints on the arm; can reach any position in space within its range of motion.
- Modular arm; to change the workspace of the arm to accommodate individual needs.
- Custom designed gripper to pick up a range of objects from a sheet of paper to a soccer ball. Adjustable claw tilt to accommodate different shapes.
- Servo control boards and motors.
- Control system combines mobility and manipulation, in a smart 9-degree-of-freedom control algorithm.
- Redundancy resolution is used for increased maneuver-ability, to eliminate singularities, and avoid joint limits and obstacles.
- Weight and Payload: –24 lbs / 8.5 lbs

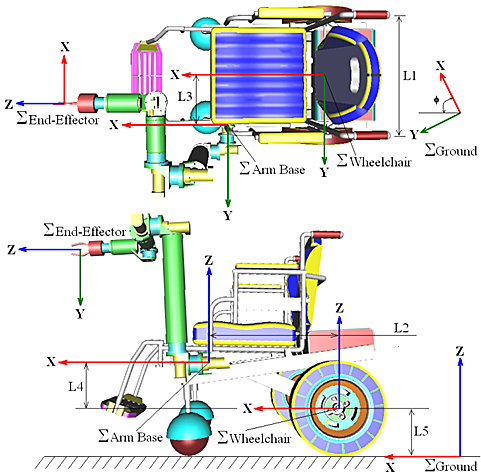
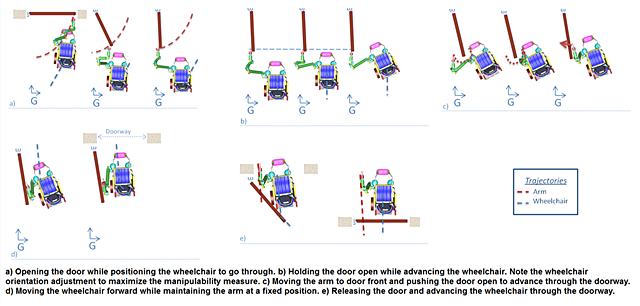
Task-Oriented Control of the WMRA System
- Optimization methods are used to fulfill two separate trajectories simultaneously, one for the gripper and the other for the wheelchair.
- Having two separate trajectories can be utilized to achieve various ADL tasks, such as opening a spring-loaded door inwards and going through the door while maintaining the pose of the gripper holding the door knob.
- Redundancy was resolved to maximize the manipulability measure during the task performance. The wheelchair motion was used to compensate for the decrease in manipulability measure of the arm while going through the door.
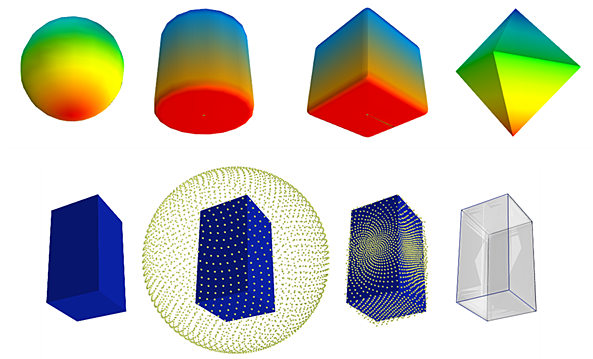
Object shape and pose recovery of unknown objects
- Reconstruct the shape and pose of a novel object to a sufficient degree of accuracy such that it permits grasp and manipulation planning.
- This is implemented two different ways: capture three images of the object and generate a silhouette and a point cloud that approximates the surface of the object. Then improve the approximation by fitting a superquadric shape to the points.
- Another method to do this is using Saliency Detection. Effective shapes can be extracted from a complex object image. These shapes can then be reconstructed and used for grasping.
- Microsoft Kinect is used to get the image and 3D information of objects of interest.
Motion scaling and grasping
- Grasps which involve a human and a robot working together are more robust than those which are either autonomous or teleoperated.
- Intention based assistance to the human teleoperating the arm in the form of motion scaling can enhance the arm's usability and the user's capabilities.
- Using Kinect to extract basic shape and pose information of objects, a pre-shape configuration for grasping is determined through intention estimation algorithms (Hidden-Markov Model).
- Motion assistance is provided to the user based on the pre-shape configuration by scaling up the user's motion towards that configuration and scaling down the user's motion against that configuration.
- Fine adjustment of the gripper's pose is done using simple geometrical methods and finally the grasp is realized.
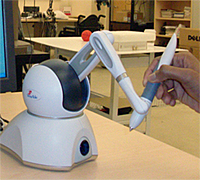
- Omni Phantom Haptic device from Sensable Technologies is used as the master device and WMRA as the remote robot.
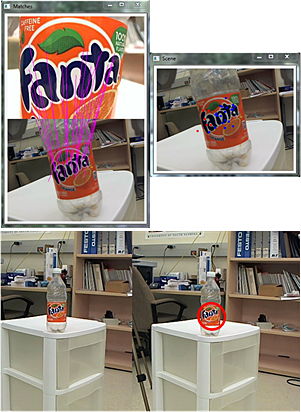
Mobility & Manipulation using Visual Servoing Control
- Image-based visual servoing (IBVS) approach with scale-invariant feature transform (SIFT) was used for combined autonomously control of mobility and manipulation for the 9-DoF WMRA system.
- Physical implementation with a "Go to and Pick Up" task and a "Go to and Open the Door" task was developed and presented.
- A Logitech C910 USB webcam mounted in eye in hand configuration on the end effector was used to capture 30 fps video stream of the environment with the object in sight.
- For estimating the depth distance from the camera to the goal object, a Sharp GP2Y0A21YK infrared proximity sensor mounted just beneath the camera was utilized.
- Users operate the system with a laptop using a GUI developed for the application.
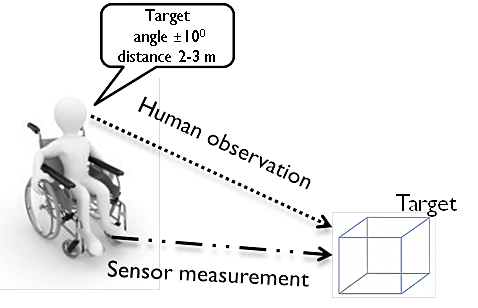
Autonomous Navigation, Simultaneous Localization and Mapping (SLAM)
- Simultaneous localization and mapping (SLAM) algorithm is used to localize the wheelchair in an unstructured environment, and to build a dynamically changing map of the environment.
- Motion planning and navigation can be optimized based on SLAM data to reach a moving target and achieve a task while avoiding moving obstacles.
- Human perception and observations can be integrated to the algorithm to achieve better results and more accurate task implementation.
- Microsoft Kinect is utilized to capture the 3D information of the environment.
- Extended Kalman Filter is used for localization.
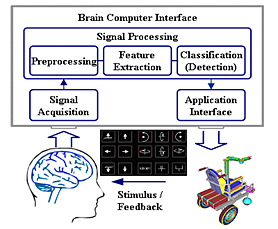
Vision-based system for selecting objects and tasks using a Brain-Computer Interface (BCI)
- Using the Brain-Computer Interface can be very tiring and lengthy in order to communicate choices to the system. Vision-based algorithm is being developed to make it easier to use any user interface system to control WMRA, including the BCI.
- This interface is useful for patients who are completely locked-in and are unable to use any body parts for doing their daily activities.
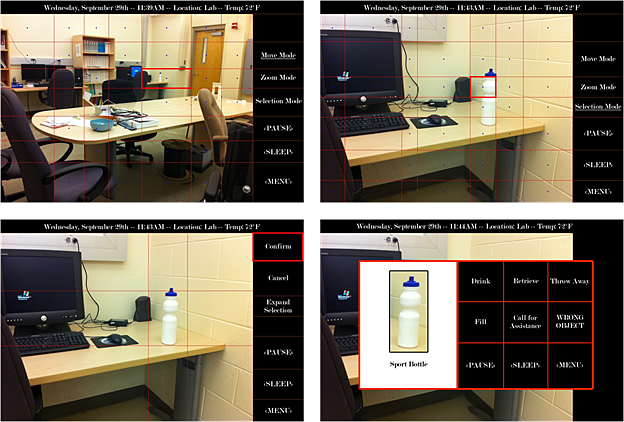
- In order for this selection system to be operable by BCI, the scene is divided into a grid, like that used in the P300 Speller.
- The user needs to select the cell whose blue dot falls on the object of interest.
- The cells are flashed in a random order. A cap with electrodes worn by the user detects P300 Electroencephalography (EEG) signals in the users' brain when an Even Related Potential (ERP) is generated.
- An ERP is generated based on the Oddball Paradigm in which a signal occurs when an odd event occurs from a sequence of events. The odd event in this case is the flashing of the cell of interest out of the random flashing.
- The BCI2000 program detects the cell that the user is focusing his/her attention on and then by using a Flood-fill algorithm and edge detection, segments the object.
- Once the object is selected, it runs through an object recognition algorithm to recognize the object and create a list of possible tasks to do with the object. This list is displayed to the user and interfaced with the BCI.
- The program is being developed to include functions for zooming and moving the robot to allow for more precise selection.
- The gridlines are generated intelligently using edge detection output, to increase the likelihood of selection in a single iteration.
- This system will also be operable by a myriad of other user input devices, including eye tracking, voice control, and touch-screen.
- Previous implementations included directional control of the WMRA system using BCI for teleoperation. This implementation includes the vision based algorithm that is integrated to the BCI for autonomous motion.

Experimental evaluation of WMRA devices
- JACO arm from Kinova and iARM from Exact Dynamics are two commercially available wheelchair-mounted robotic arms (WMRAs) internationally.
- Experimental evaluation of commercially available WMRAs in a controlled test environment has been conducted to study the efficacy of using such devices.
- The goal was to quantitatively compare each device through a standardized testing protocol. The study produced theoretical manipulability measurements as well as efficacy ratings of each device based on Denavit-Hartenberg kinematic parameters and physical testing, respectively.
- Both the manipulator and control devices of WMRA systems were evaluated. The iARM was found to be more effective than the JACO arm based on kinematic analysis. Despite this, the JACO arm was shown to be more effective than the iARM system in three of four experimental tasks.
- Effective design features were brought to light with these results. The study and its procedures may serve as a source of quantitative and qualitative data for the commercially available WMRAs.


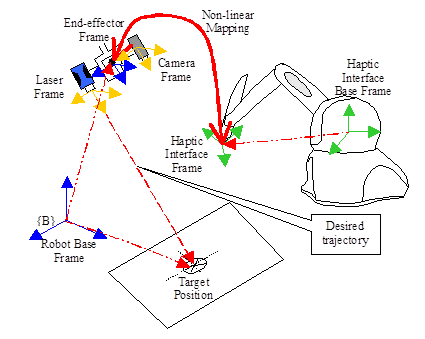
Laser Assisted Real-Time and Scaled Telerobotic Manipulator Control with Haptic Feedback for Activities of Daily Living
This is a novel method of using laser data to generate trajectories and virtual constraints in real time that assist the user teleoperating a remote arm to execute tasks in a remote unstructured environment.
The laser also helps the user to make high-level decisions such as selecting target objects by pointing the laser at them. The trajectories generated by the laser enable autonomous control of the remote arm and the virtual constraints enable scaled teleoperation and virtual fixtures based teleoperation. The assistance to the user in scaled and virtual fixture based teleoperation modes is either based on position feedback or force feedback to the master. The user has the option of choosing a velocity control mode in teleoperation in which the speed of the remote arm is proportional to the displacement of the master from its initial position. At any point, the user has the option of choosing a suitable control mode after locating targets with the laser. The various control modes have been compared with each other, and time and accuracy based results have been presented for a 'pick and place' task carried out by three healthy subjects. The system is intended to assist users with disabilities to carry out their ADLs (Activities of Daily Living) but can also be used for other applications involving teleoperation of a manipulator. The system is PC based with multithreaded programming strategies for Real Time arm control and the controller is implemented on QNX.

Adaptive Recreation
Through collaboration with the School of Theatre & Dance and the School of Physical Therapy and Rehabilitation Sciences, adaptive recreational devices have been designed and developed to assist people with disabilities and amputees in various recreational activities, including dance and exercise.
Hands-Free Wheelchair
A completely hands-free operated wheelchair that responds to one's body motion was developed primarily for use in the performing arts; however its unique user interface offers endless possibilities in the fields of assistive devices for daily activities and rehabilitation. This powered wheelchair modification provides greater social interaction possibilities, increases one's independence, and advances the state of the art of sports and recreation, as well as assistive and rehabilitative technologies overall. Various prototypes of this project have been developed, including a mechanical design and a sensor-based design. A new design is underway that utilizes an iPod or other hand held devices to control the wheelchair using the gyroscope capabilities of these devices.


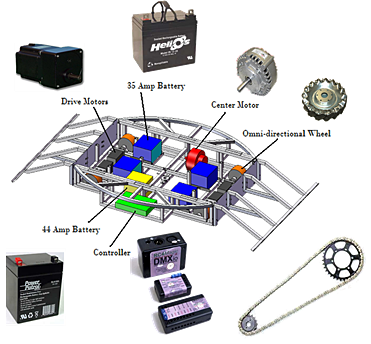
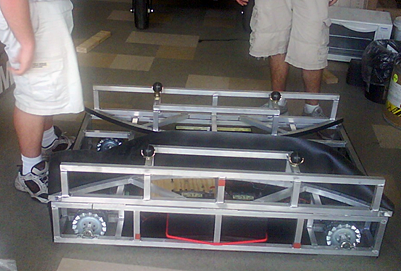
Omni-directional Rotating Platform for Dance
This project involves the design, development, and testing of a stand-alone Omni-directional mobile dance platform with an independently rotating top. A robust, remote controlled, compact, transportable, and inexpensive moving platform with a rotating top is designed. This platform adds an additional choreographic element to create a unique style of dancing, which involves the use of a variety of mobility devices and performers including dancers with disabilities. The platform is designed to hold up to five-hundred pounds with an independently rotating top while the base moves forward/backward, sideways, or diagonally using Omni-directional wheels. The existing design has a removable top surface, folding wing sections to collapse the unit down to fit through an average size doorway, and detachable ramp ends for wheelchair access. The top of the platform is driven by a compact gear train designed to deliver maximum torque within the limited space.
Terminal Devices for Prostheses Users
Various terminal devices have been developed to assist prostheses users in their recreational activities. These terminal devices are designed to improve the user's capabilities to play Golf, kayaking, rock climbing and other activities.

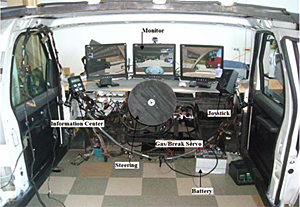
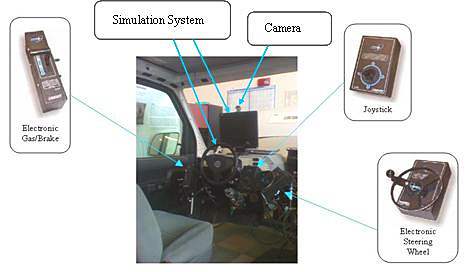
Adaptive Driving Simulation
A driver training system that combines a hand controlled modified van with a driving simulator has been developed. This system enables individuals to overcome transportation barriers that interfere with employment opportunities or access to daily activities. With the combination of AEVIT (Advanced Electronic Vehicle Interface Technology) and virtual reality driving simulator known as SSI (Simulator Systems International), an environment is created where a user can have different interfaces to learn to operate a real time motor vehicle. Various adaptive controls are integrated to the system. Analysis of various controls with various user abilities can be used to recommend specific devices and to train users in the virtual environment before training on their modified vehicle.

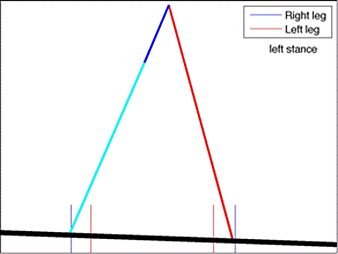
Asymmetric Passive Dynamic Walkers
Passive dynamic walkers (PDW) are devices that are able to walk down a slope without any active feedback using gravity as the only energy source. In this research, we are examining asymmetric walking in a similar, but different approach, as the above Gait Enhancing Mobile Shoe Project. Typically, PDWs have used symmetric walkers (i.e., same masses and lengths on each side), which generally results in symmetric gaits. However, individuals with a stroke and individuals that wear a prosthetic do not have physical symmetry between both sides of their body. By changing one physical parameter on one of the two legs in the PDW, we can show a number of stable asymmetric gait patterns where one leg has a consistenty different step length than the other, as shown on the right. The figure on the right has the right knee moved up the leg. This asymmetric model of walking will enable us to test the effect of different physical changes on how individuals will alter their gait.
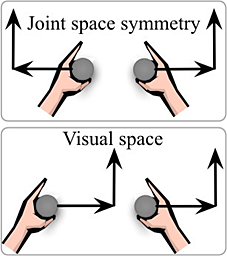
Bimanual Symmetric Motions
Many daily tasks require that a person simultaneously use both hands, such as opening the lid on a jar or moving a large book. Such bimanual tasks are difficult for people who have a stroke, but the tight neural coupling across the body can potentially allow individuals to self-rehabilitate by physically coupling their hands. To examine potential methods for robot-assisted bimanual rehabilitation, we are performing haptic tracking experiments where individuals experience a trajectory on one hand and attempt to recreate it with their other hand. Despite the physical symmetries, the results show that joint space motions are more difficult to achieve than motions in the visually centered space.
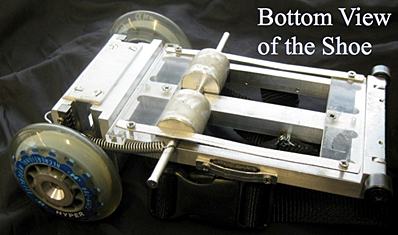
Gait Enhancing Mobile Shoe
Certain types of central nervous system damage, such as stroke, can cause an asymmetric walking gait. One rehabilitation method uses a split-belt treadmill to help rehabilitate impaired individuals. The split-belt treadmill causes each leg to move at a different speed while in contact with the ground. The split-belt treadmill has been shown to help rehabilitate walking impaired individuals on the treadmill, but there is one distinct drawback; the corrected gait does not transfer well to walking over ground. To increase the gait transference to walking over ground, I designed and built a passive shoe that admits a motion similar to that felt when walking on a split-belt treadmill. The gait enhancing mobile shoe (GEMS) alters the wearer's gait by causing one foot to move backward during the stance phase while walking over ground. No external power is required since the shoe mechanically converts the wearer's downward and horizontal forces into a backward motion. This shoe allows a patient to walk over ground while experiencing the same gait altering effects as felt on a split-belt treadmill, which should aid in transferring the corrected gait to walking in natural environments. This work is funded by the Eunice Kennedy Shriver National Institute of Child Health & Human Development, NIH NICHD, award number R21HD066200 and is in collaboration with Amy Bastian at the Kennedy Krieger Institute and Erin Vasudevan at the Moss Rehabilitation Research Institute.
Using Virtual Reality and Robotics Technologies for Vocational Evaluation, Training and Placement
The goal of this project is to improve the effectiveness of vocational rehabilitation services by providing an environment to assess and train individuals with severe disabilities and underserved groups in a safe, adaptable and motivating environment. Using virtual reality, simulators, robotics, and feedback interfaces, this project will allow the vocational rehabilitation population to try various jobs, tasks, virtual environments and assistive technologies prior to entering the actual employment setting. This will aid job evaluators and job coaches assess, train and place persons with various impairments. Using virtual reality, simulators, robotics, and feedback interfaces the proposed project will:
- Develop layered 3D virtual reality simulation and controlled physical environments for several job-related tasks (customer service, hospitality industry, and production environments)
- Assess DVR clients' work abilities with their trainers and find possible work venues using virtual reality and controlled physical environments.
- Train DVR clients on the job of their choice of possible job environments based on the conducted assessments.
- Job placement and follow-up for feedback and adjustments.
The proposed project will simulate job environments such as a commercial kitchen, an industrial warehouse, a retail store or other potential locations that an individual will likely work. Features of the simulator could include layering of colors, ambient noise, physical reach parameters and various user interfaces. The complexity of the simulated job tasks could be varied depending on the limitations of the user to allow for a gradual progression to more complex tasks in order to enhance job placement and training.

Wearable Sensors
In collaboration with Draper Laboratories and the Veterans Administration Hospital, wearable sensors research has been conducted in two different projects. A balance belt project, and a portable motion analysis project.
Balance Belt
The purpose of this study is to develop a wearable Balance Belt to alert patients with abnormal vestibular function for injury and fall prevention. The user will be alerted using four vibrotactiles situated around the belt in case the inertial measurement unit (IMU) senses a good potential of misbalance.


Portable Motion Analysis System
The purpose of this study is to develop a wearable motion analysis system (WMAS) using commercially available inertial measurement units (IMU) working in unison to record and output gait parameters in a clinically relevant way. The WMAS must accurately and reliably output common gait parameters such as gait speed, stride length, torso motion and head rotation velocities which are often indicators of TBI. Validation of the wearable motion analysis system capabilities has been conducted using the Vicon optical based motion analysis system with healthy subjects during various gait trials including increasing and decreasing cadence and speed; and turning. A graphical user interface (GUI) that is clinically relevant will be developed to make this system usable outside of clinical settings.

Motion Analysis and Prosthetics Research
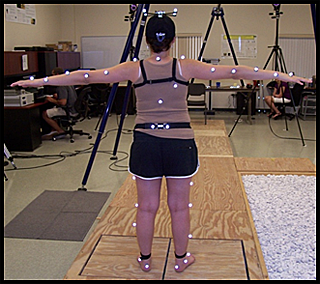
Through collaboration with the School of Theatre & Dance and the School of Physical Therapy and Rehabilitation Sciences, biomechanics of human body motion is analyzed for various activities using Vicon motion analysis system, leading to fewer injuries, and better training practices. These activities include upper and lower body motion practices used by athletes and dancers, as well as prosthetics users when performing recreational or daily activities.
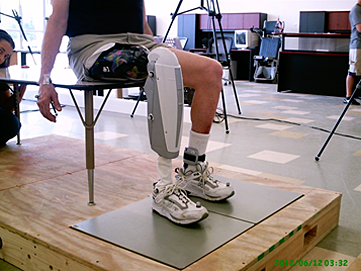
Current upper-limb prosthetic devices have powered wrist rotation only, making it difficult to grasp and manipulate objects. The wrist and shoulder compensatory motions of people with transradial prostheses have been investigated in the eight-camera infrared Vicon visual system that collects and analyzes three-dimensional movement data. This information helps clinicians, researchers, and designers develop more effective and practical prosthetic devices. The intact joints of the upper limb compensate for the limitations of the prosthesis using awkward motions. By analyzing the compensatory motions required for activities of daily living due to limitations of the prosthesis we hope to be able to improve the design and selection of prostheses.



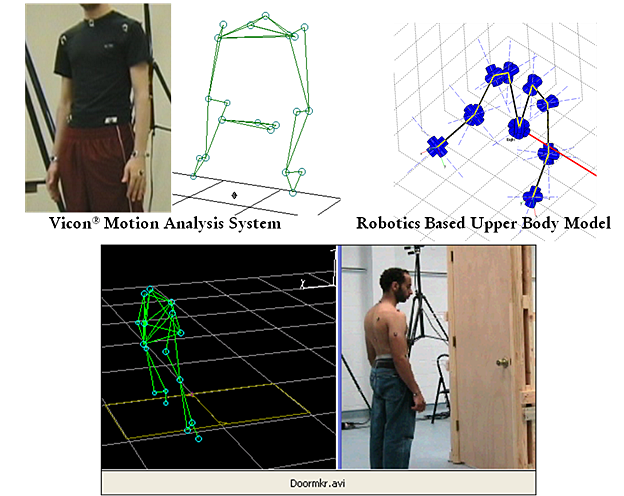
Simulation Tool for Prediction of Human-Upper Body Motion
This project is dedicated to the development of a simulation tool consisting of a robotics-based human body model (RHBM) to predict functional motions, and integrated modules for aid in prescription, training, comparative study, and determination of design parameters of upper extremity prostheses. The simulation of human performance of activities of daily living while using various prosthetic devices is optimized by data collected in the motion analysis lab.
The current generation of the RHBM has been developed in MATLAB and is a 25 degree of freedom robotics based kinematic model, with subject specific parameters. The model has been trained and validated using motion analysis data from ten control subjects and data collected from amputee subjects is being integrated as it is collected.
Socket Residual-limb Interface Model
This project concentrates on measuring and predicting motion occurring at the socket residual limb interface. The current model will be a 4 degree of freedom robotics based kinetic model. Movement between the residual limb and prosthetic socket will be collected by a motion capture system (socket rotations and translations) and a new optics based device (relative slip between internal socket face and residual limb skin surface).

Human Upper Body Modeling and Simulation in Space Conditions for Astronaut Training
The goal of this project is to develop a robotics based human upper body model (RHBM), and associated constraints for the prediction and simulation of human motion in confined spaces, and under microgravity conditions to aid astronaut training. A force based component with an adjustable gravity term will also be added to the current kinematic based RHBM to allow for the simulation of external forces at varying levels of gravity: moon gravity; and microgravity. Statistically based probability constraints from motion capture data will also be incorporated to determine if a mixed method of modeling is more accurate and more efficient for studying upper limb movements such as using tools and moving objects. A motion analysis system will be used to collect kinematic data of subjects performing astronaut based activities of daily living in a confined space similar to the International Space Station. Analysis of this data will then be used to derive the model parameters. Functional joint center estimations will be used to find the geometric parameters of the model, and a variety of control methods including using force fields and statistical processes to generate microgravity will be used to determine the control parameters.

Publications
Full Patents Granted
2020
2019
2018
2017
2016
2015
Published Conference Papers, Journal Papers, and Book Chapters
2021
2020
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
2009
2008
2007
2006
2005
2004
2003
2002
2001
2000
Theses and Dissertations
2021
2020
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
2009
2008
2007
2006
2005
2004
2003
2002
2001
2000
Learn More
"Center for Assistive, Rehabilitation & Robotics Technologies"
Research - Education - Service